
Pročitaj više

Zaključci ukazuju na to da Nexus pruža napredno, automatizovano i održivo rešenje zaupravljanje otpadom i operacije u teškim uslovima, doprinoseći zaštiti životne sredine ipovećanoj bezbednosti.
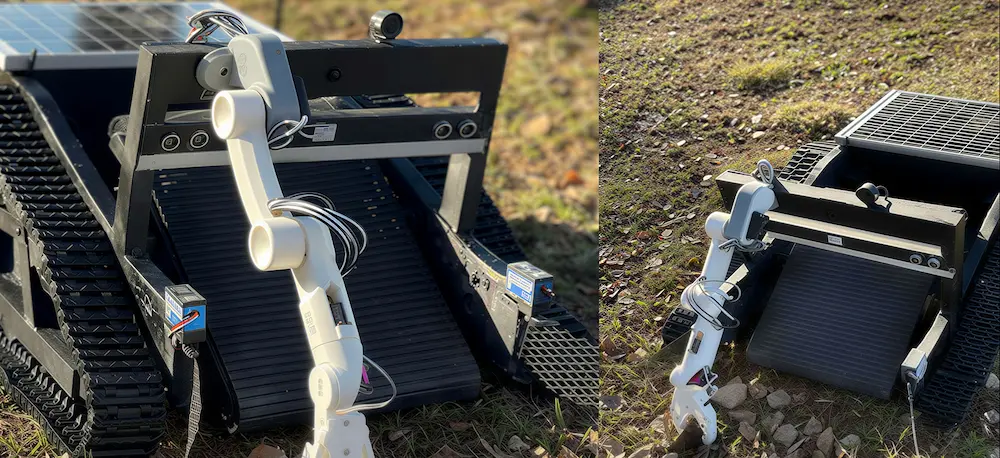
Nexus amfibija je inovativno višenamjensko vozilo namijenjeno specijalnim operacijama u zahtjevnim i opasnim terenima. Cilj istraživanja bio je razvoj i testiranje sistema za efikasno sakupljanje otpada, izviđanje terena i detekciju opasnih materijala uz minimalan ljudski faktor.
Vozilo je ispitano u različitim uslovima, uključujući vlažne i vodene terene, kako bi se procenila njegova sposobnost prepoznavanja, razvrstavanja i sakupljanja otpada. Pored toga, Nexus omogućava detekciju mina, neeksplodiranih bombi i drugih opasnih materijala pomoću naprednih senzora. Detekcija radioaktivnih izvora dodatno doprinosi bezbednosti prilikom rada u nepoznatim i potencijalno opasnim područjima.
Poseban akcenat stavljen je na autonomiju kretanja i precizno lociranje prepreka, pri čemu se dodatno može koristiti dron za detaljno izviđanje i mapiranje terena.
Nexus amfibija koristi gusenični pogon za stabilno kretanje po terenu, dok propeleri omogućavaju plovidbu. Pokretna traka sakuplja otpad i prebacuje ga u spremnik, a robotska ruka sa šest servo-motora i širokougaonom kamerom obavlja precizne operacije. Detekciju opasnih materijala vrše termalna i širokougaona kamera, metal-detektor i senzor radioaktivnosti, dok spremnik meri popunjenost ultrazvučnim senzorima. Komunikacija je osigurana kombinacijom LoRa i SIM7600E modula, a računarsku obradu vrše dva Raspberry Pi 5 uređaja i Arduino Mega sa efikasnom razmenom podataka.
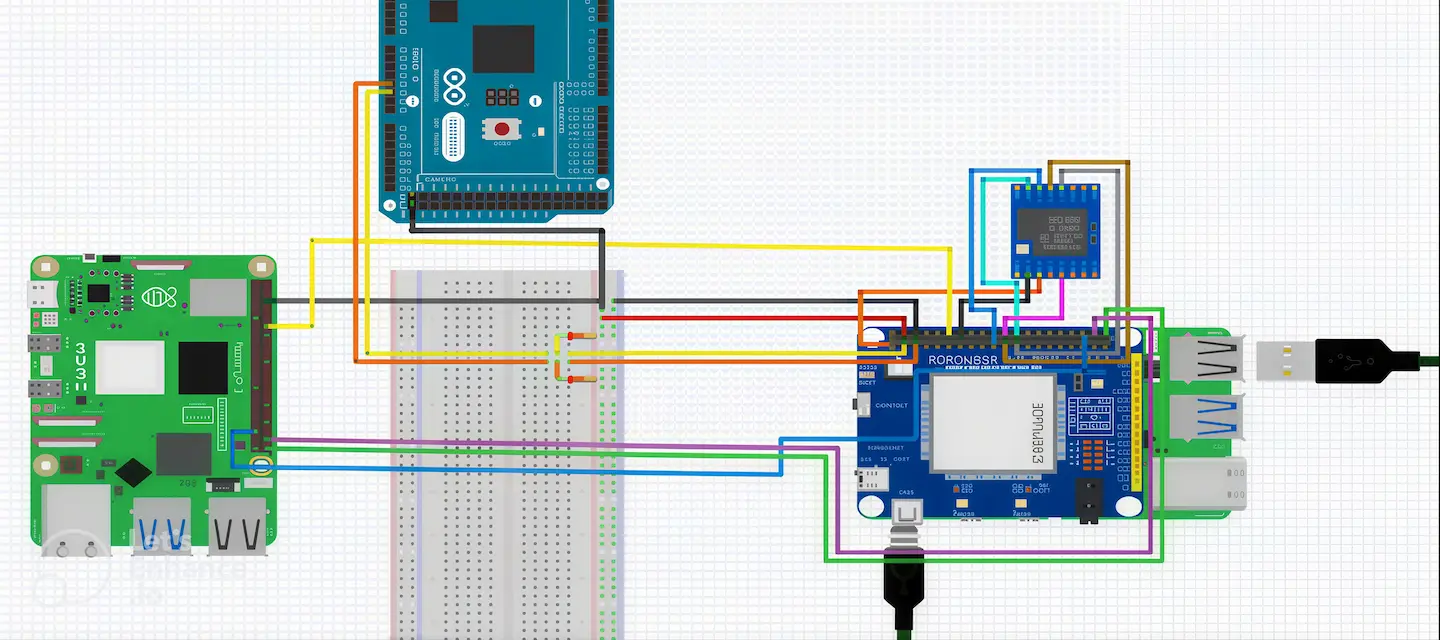
sl. 4 – Deo šematskog prikaza povezivanja komponenti za komunikaciju u Fritzing program
Komunikacija između RP Master-a i RP2 (sl. 2) preko SPI magistrale (sl.4). Ovi kodovi su osnova za funkcionalnost vozila, a dalja optimizacija uključuje integracijuveštačke inteligencije, proširenu analizu podataka i dodatne algoritme za autonomno kretanje.
# Ovaj deo koda prikazuje način na koji RP Master i RP2 razmenjuju podatke preko SPI
spi.xfer(size.to_bytes(4, 'big'))
time.sleep(0.001)
chunk_size = 1024
for i in range(0, size, chunk_size):
chunk = img_bytes[i:i + chunk_size]
spi.xfer(list(chunk))
time.sleep(0.001)
# Kod koji omogućava precizno praćenje pozicije vozila i slanje koordinata
SENSOR_SIGNALR_URL = "<senzorski signalr url>"
client = connect_signalr(SENSOR_SIGNALR_URL, token)
if client is None: return
client.send("SendTemperatureHumidity", [temperatura, vlaznost])
client.send("SendSensorData", ["radioaktivnost", str(radioaktivnost)])
client.send("SendSensorData", ["voda", voda])
client.send("SendSensorData", ["metal", metal])
await asyncio.sleep(5)
sl. 5 – Interfejs sistema za kontrolu
Glavna funkcija vozila je detekcija i sakupljanje otpada, uz prepoznavanje i obeležavanjeopasnih materijala. Može identifikovati mine, eksplozivne naprave i radioaktivni otpad, čimedoprinosi bezbednosti i omogućava specijalizovanim timovima preciznije i sigurnije uklanjanjepretnji. Pored toga, vozilo omogućava: daljinsku kontrolu i autonomnu navigaciju u opasnimzonama, označavanje na mapi za dalju intervenciju, sakupljanje i transport otpada,minimalizujući rizik po ljudski život. Ekološki monitoring kroz prikupljanje podataka ozagađenju, temperaturi i sastavu tla ili vode. Primenu u spasilačkim misijama i vojnim operacijama, gde može detektovati i obeležiti pretnje pre nego što timovi pristupe terenu.
Celokupni sistem je testiran na više lokacija sa različitim zadacima i operacijama. Testovi susprovedeni u kontrolisanim i realnim uslovima, uz korišćenje 3D modela mine, bombe i uzorkaza testiranje radioaktivnosti (Arbinijum – 241). Funkcionalnost sakupljanja otpada je testiranana Oblačinskom jezeru.
Sistem Nexus amfibija efikasno detektuje i uklanja otpad, identifikuje opasne materijale poputmina i radioaktivnog otpada, te kombinuje autonomnu i daljinsku kontrolu za veću preciznost.Omogućava primenu na kopnu i vodi, povećava bezbednost i obeležava pretnje u realnomvremenu. Kao ključno unapređenje predlaže se integracija drona za bolji nadzor terena i sistemza snimanje podvodnog dna radi preciznije analize i detekcije objekata ispod površine. Daljirazvoj može uključiti naprednije algoritme za prepoznavanje, bolju energetsku efikasnost iproširenje senzorske mreže za veću pouzdanost sistema. Nexus amfibija doprinosi očuvanjuživotne sredine i smanjuje prisustvo ljudi u opasnim situacijama, čime povećava sigurnost iefikasnost u različitim primenama.


